
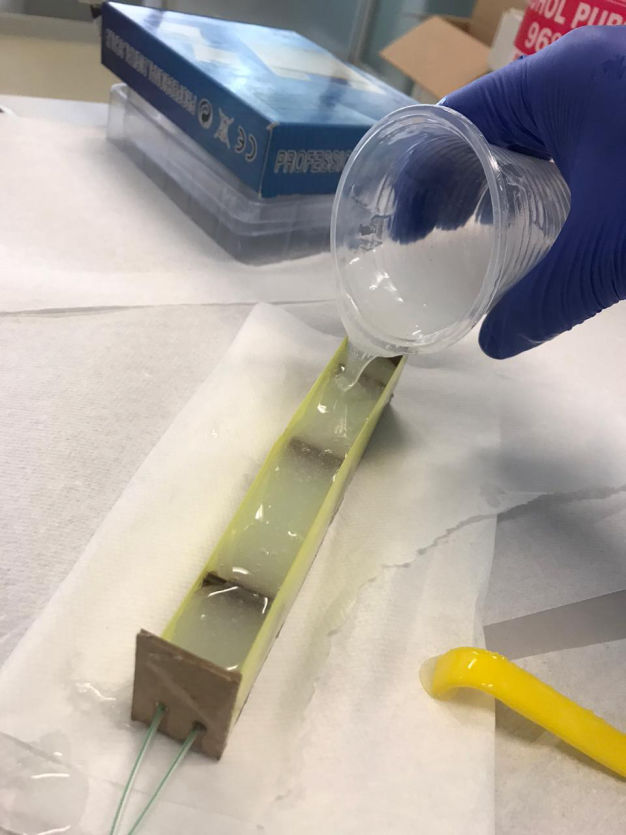
Para realizar la automatización del movimiento periódico de flexión-extensión para alcanzar a asemejar con el movimiento tipo Power Grasp hemos adquirido unos servomotores sg90 y una placa de Arduino UNO.
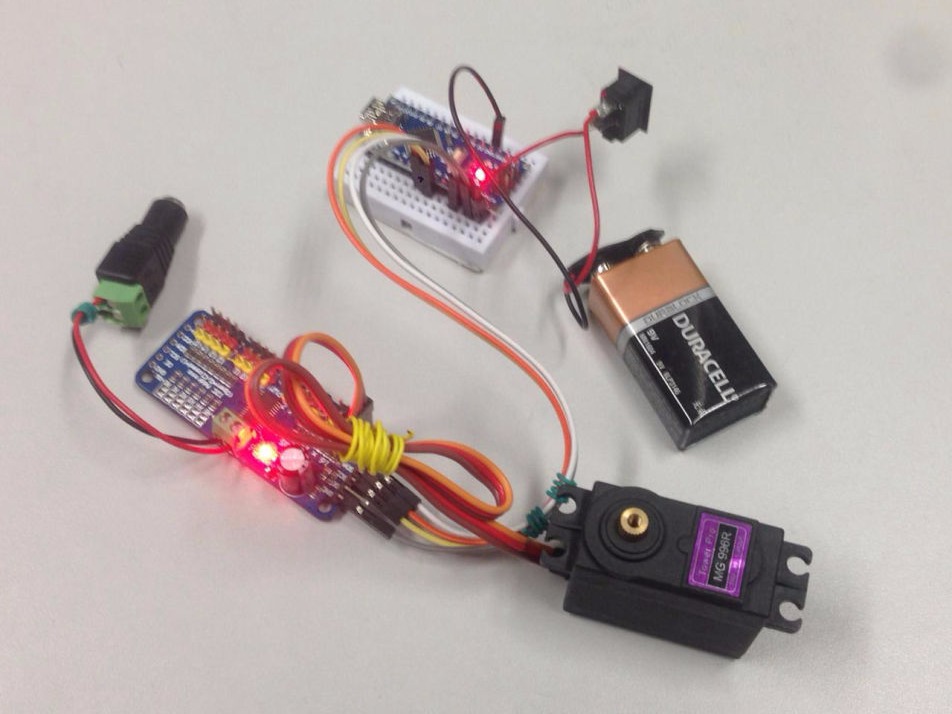
Al percatarnos de que los servomotores consumían una corriente elevada, de entre 500mA a 1A, y que el Arduino sería insuficiente para poder alimentar a los servos, decidimos comprar una batería externa (Aparte de la que ya iría para alimentar al Arduino) y adquirimos un controlador de servos (pca9685) para facilitar las conexiones.
Sin embargo, la batería genera una tensión de 9v, pero necesitamos que sea de 5v para alimentarlos de forma adecuada, por lo cual hemos adquirido un regulador de voltaje lm2596s.
Así, soldamos los bornes del regulador para conectar la batería al controlador.
Posteriormente hemos soldado, de igual manera, un interruptor para poder encender el dispositivo de forma externa, haciendo uso de los mismos pines de Vin y Ground que posee el Arduino.
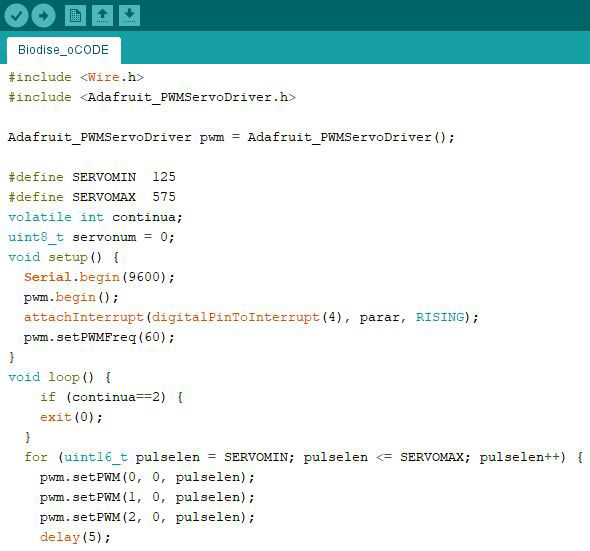
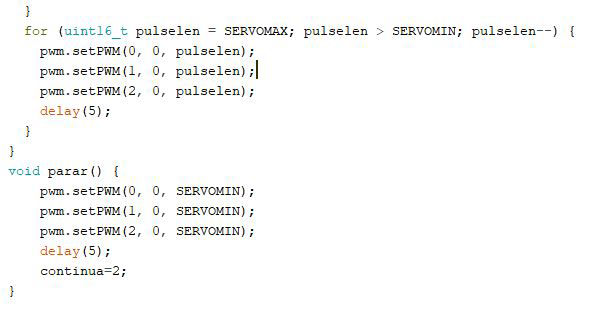
Luego de ello, procedimos con la elaboración del código en la interfaz de Arduino:
Mientras, está pendiente la programación de un pulsador para calibrar una posición fija de extensión para el sistema mecánico.
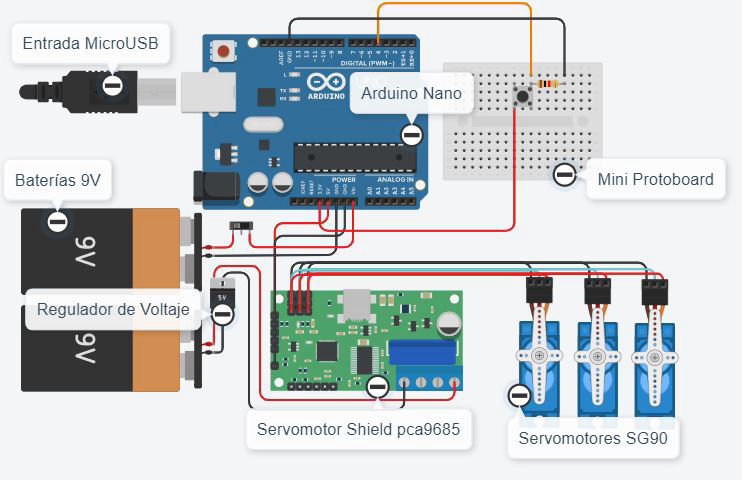
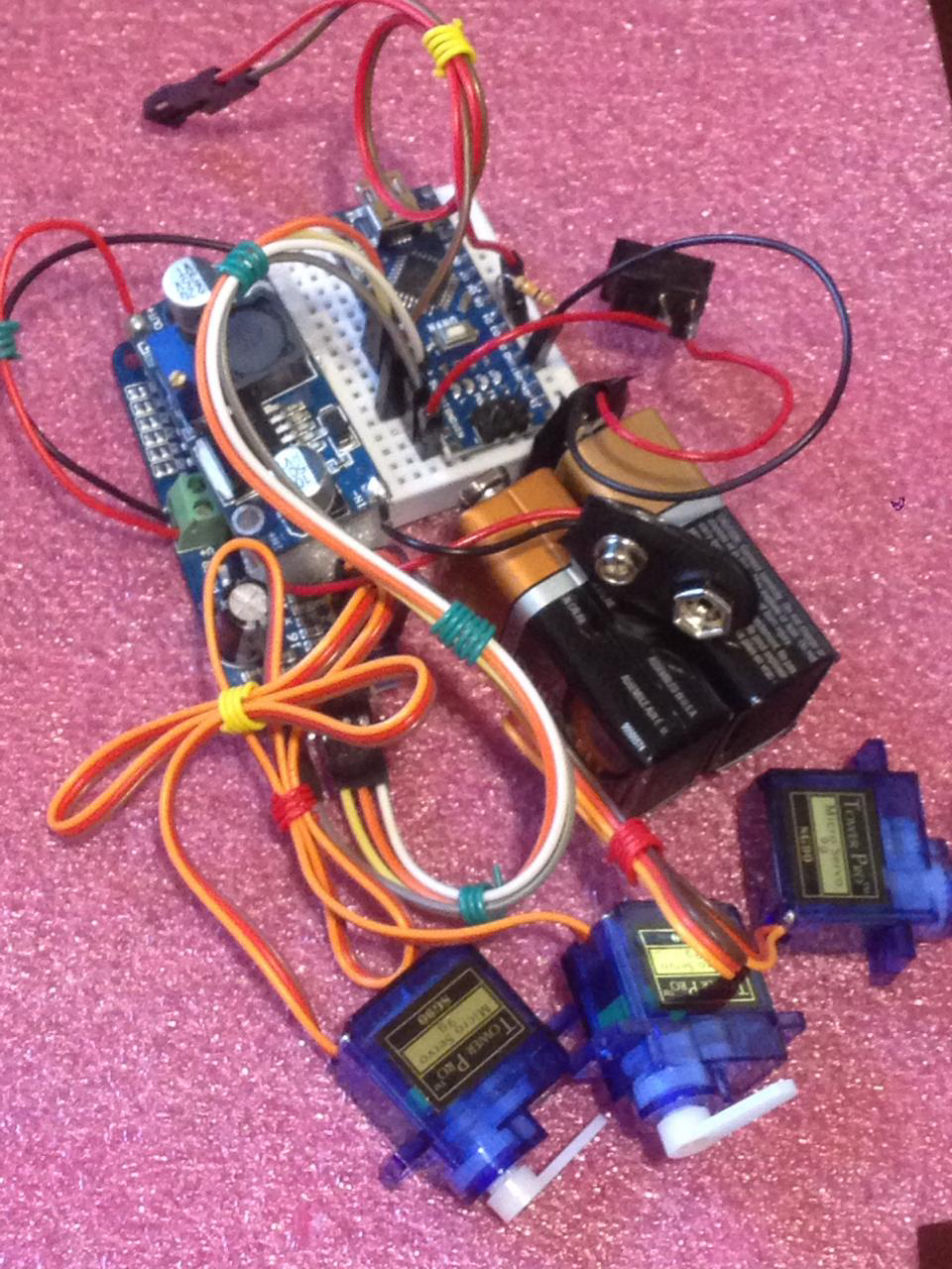
Además, debido a una recomendación de los coordinadores del curso, decidimos cambiar el Arduino uno por un Arduino nano para optimizar el espacio. La ventaja es que la funcionalidad de los pines de ambas placas es la misma y esta última es de un tamaño mucho menor.