Más área de contacto
Usamos once superficies de contacto para que pueda acomodarse mejor a cada dedo.
Para el desarrollo de los grippers tomamos en cuenta la inclusión de factores más precisos al momento de prototipar: la resistencia de la mano, la fuerza de los motores, el tamaño más apropiado y, sobre todo, mantener el acto de cerrar el puño (rango de 100%).
Para el desarrollo de los primeros planos para los grippers, nos valimos de diversas referencias para adaptar mecanismos ya existentes a nuestro propósito.
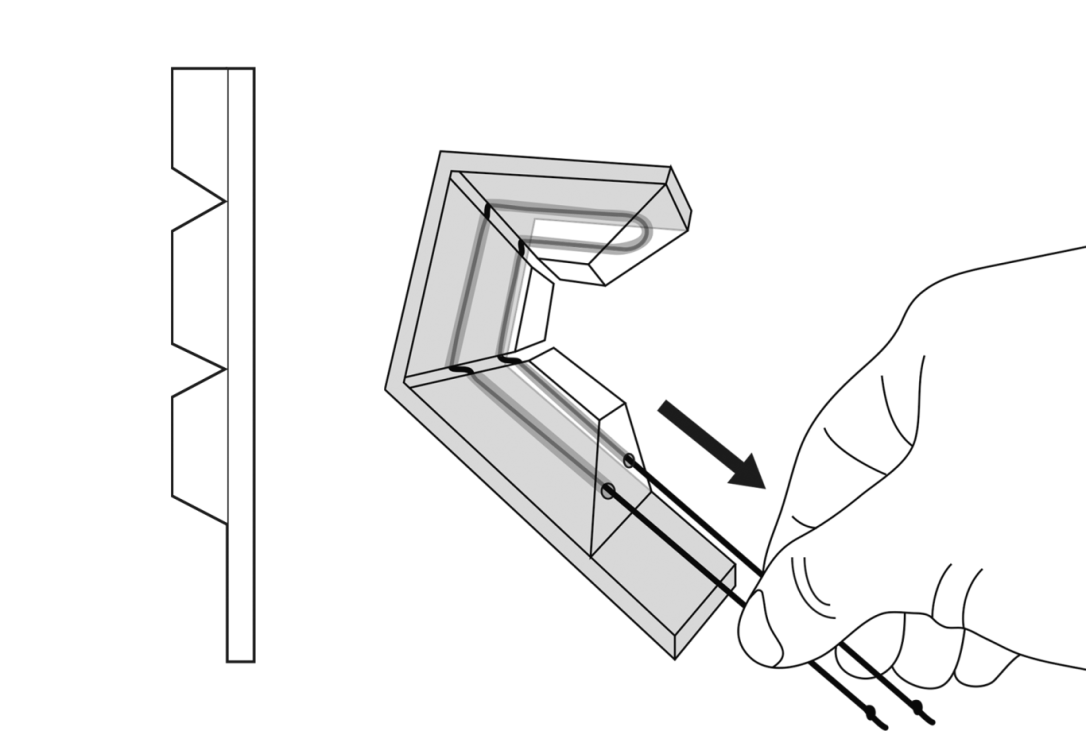

Fig.1. Ilustraciones de fabricación "SDM Finger".
Fuente: Soft Robotics Toolkit.
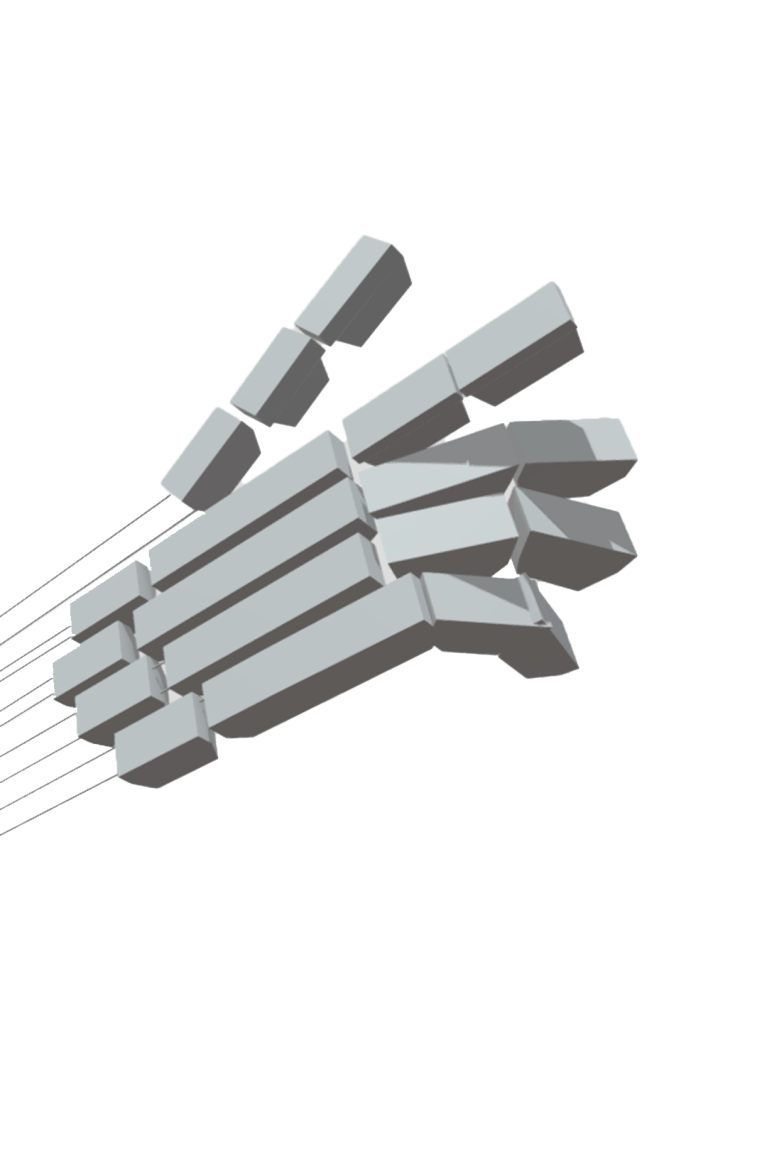
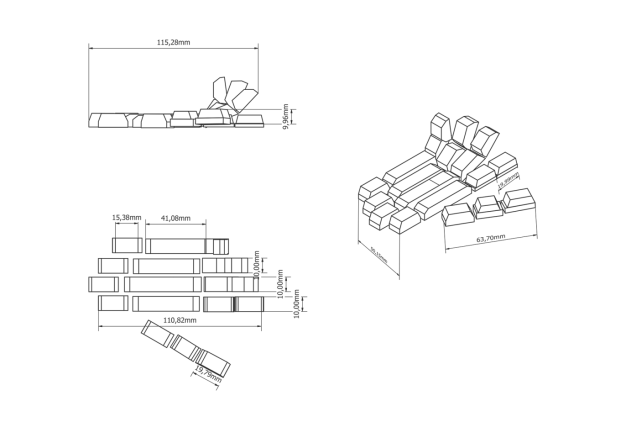
Fig.2. Ilustraciones de modelado 3D y planos de grippers.
Fuente: elaboración propia.
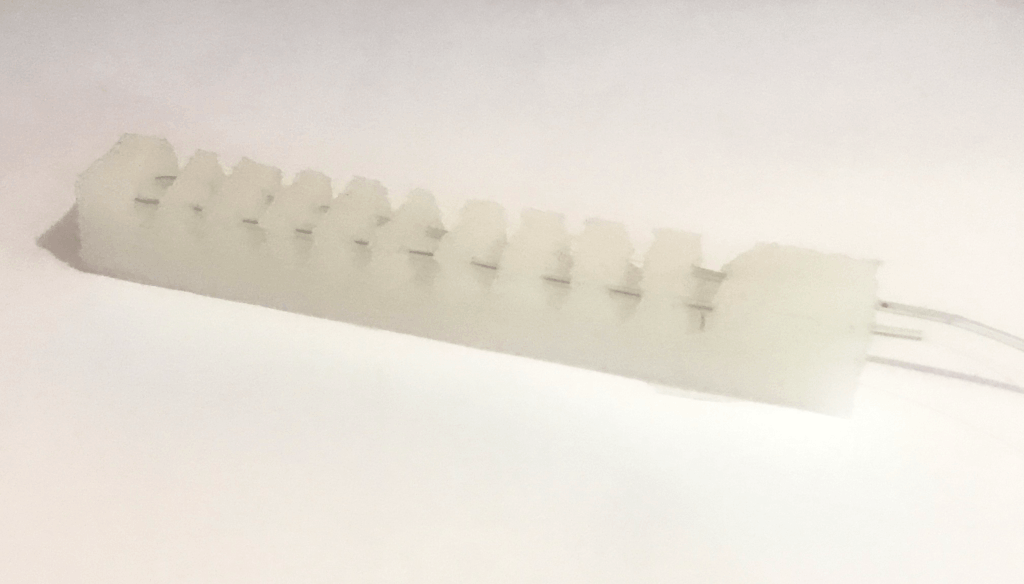
Usamos once superficies de contacto para que pueda acomodarse mejor a cada dedo.
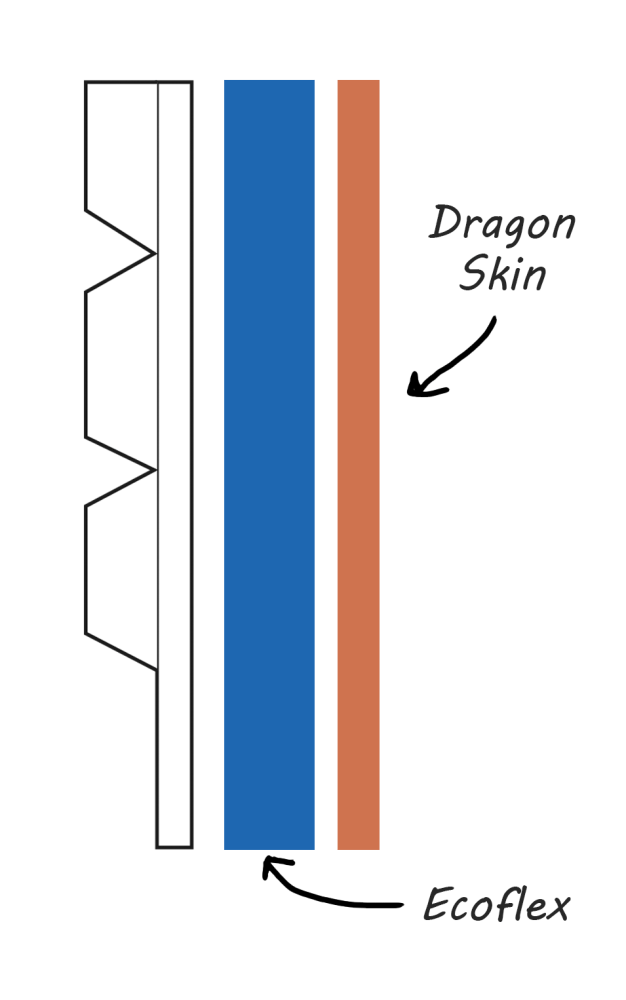
Usamos 50% de cada polímero (rígido superior y blando inferior).
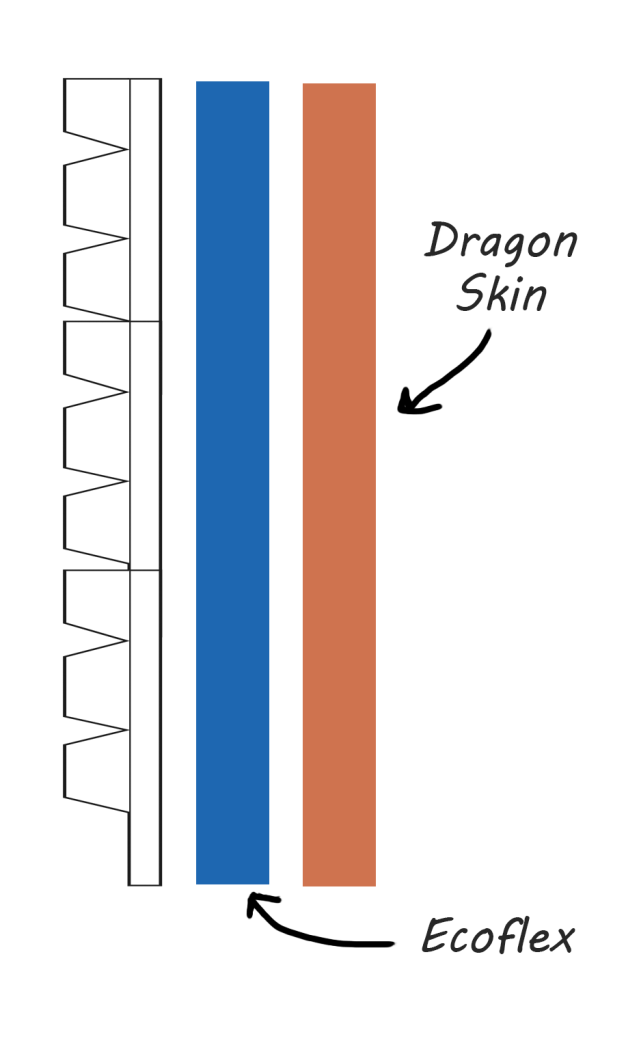
De acuerdo a lo visto experimentalmente, se obtuvo el siguiente resultado:
RANGO: Muy bueno
RIGIDEZ: Media
FUERZA NECESARIA: Poca
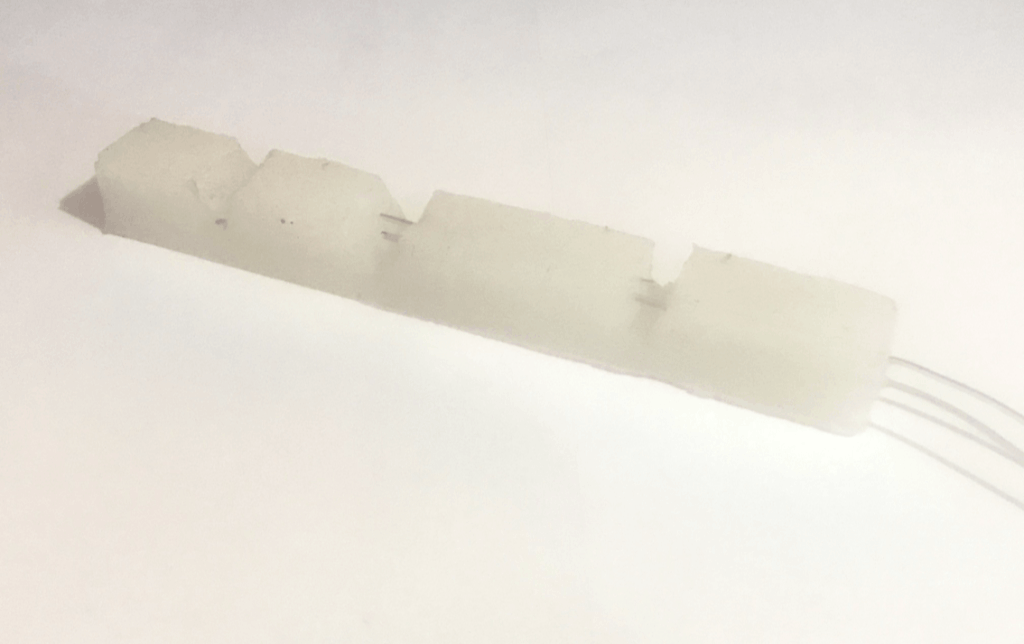
Usamos las misma área de contacto que en el modelo original.
Usamos el polímero rígido en la parte inferior y el blando en la parte superior.
De acuerdo a lo visto experimentalmente, se obtuvo el siguiente resultado:
RANGO: Malo
RIGIDEZ: Media
FUERZA NECESARIA: Mucha
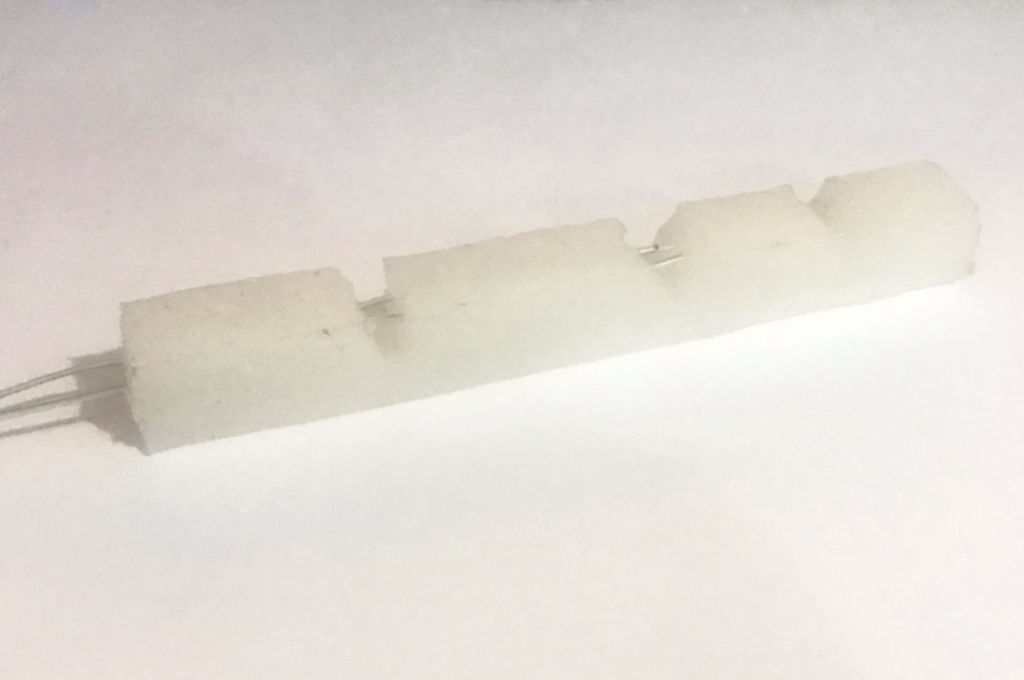
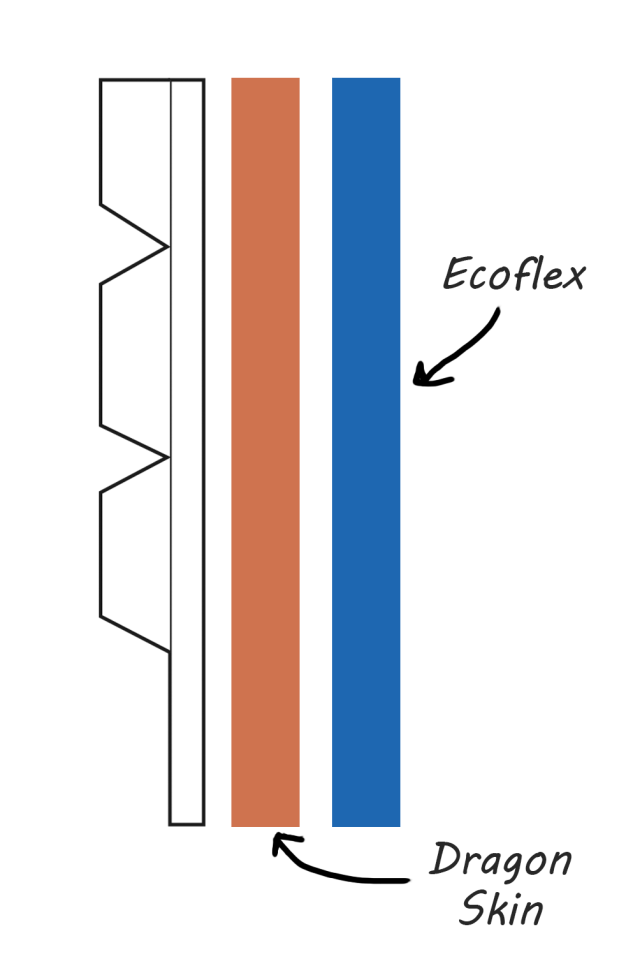
Usamos las misma área de contacto que en el modelo original.
Se utilizó el polímero blando en la parte inferior (65%) y el duro en la superior (35%).
De acuerdo a lo visto experimentalmente, se obtuvo el siguiente resultado:
RANGO: Bueno
RIGIDEZ: Media
FUERZA NECESARIA: Poca
La modificación principal es el servo para realizar la tracción del nylon que sujeta a los grippers. El servo mg90, de torque de 1.2kg.cm, al ser insuficiente para realizar esa labor debido a los requerimientos de fuerza, fue reemplazado por un servo mg996, caracterizado por tener un torque elevado de 9.4kg.cm, lo cual resultó ser ideal para el objetivo planteado, puesto que jalaba con éxito los hilos hasta conseguir la flexión completa del gripper. Para la presentación de esta semana, hemos decidido usar un circuito provisional con una placa Arduino Uno para comprobar la funcionalidad principal del dispositivo. Queda pendiente añadir al circuito original, puesto al inconveniente con el tema de la alimentación, debido a que unas baterías de 9v son insuficientes para alimentar a los servos por un tiempo prolongado. Para ello usaremos un transformador 5v 2A y un adaptador DC hembra.