El concepto
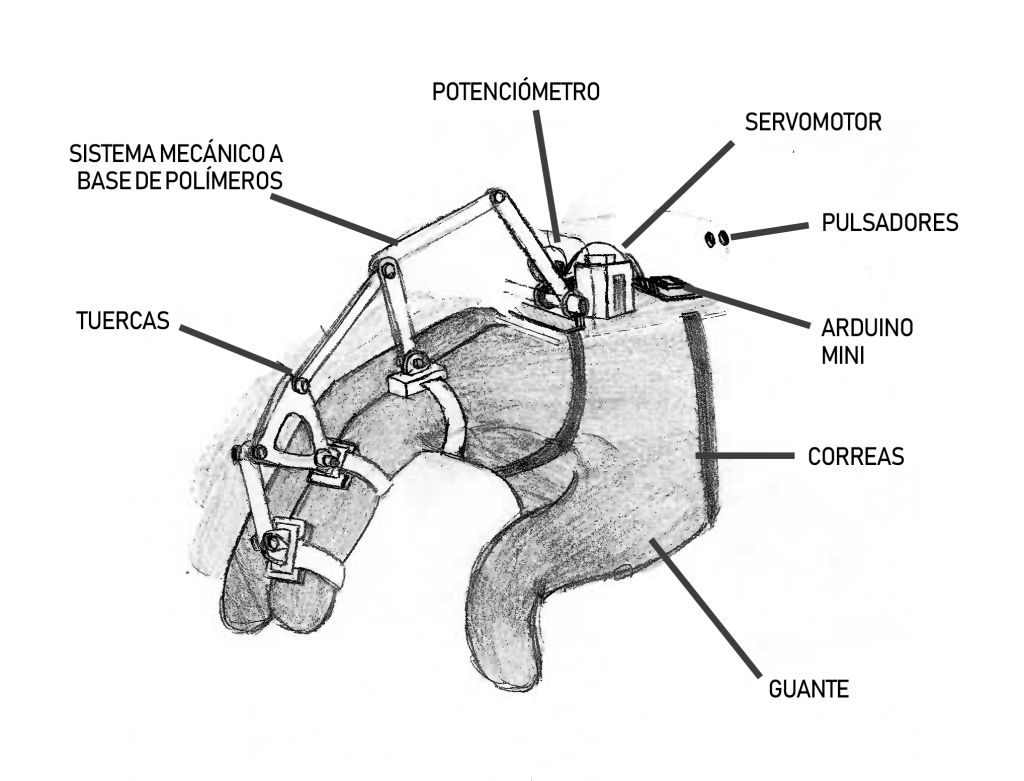
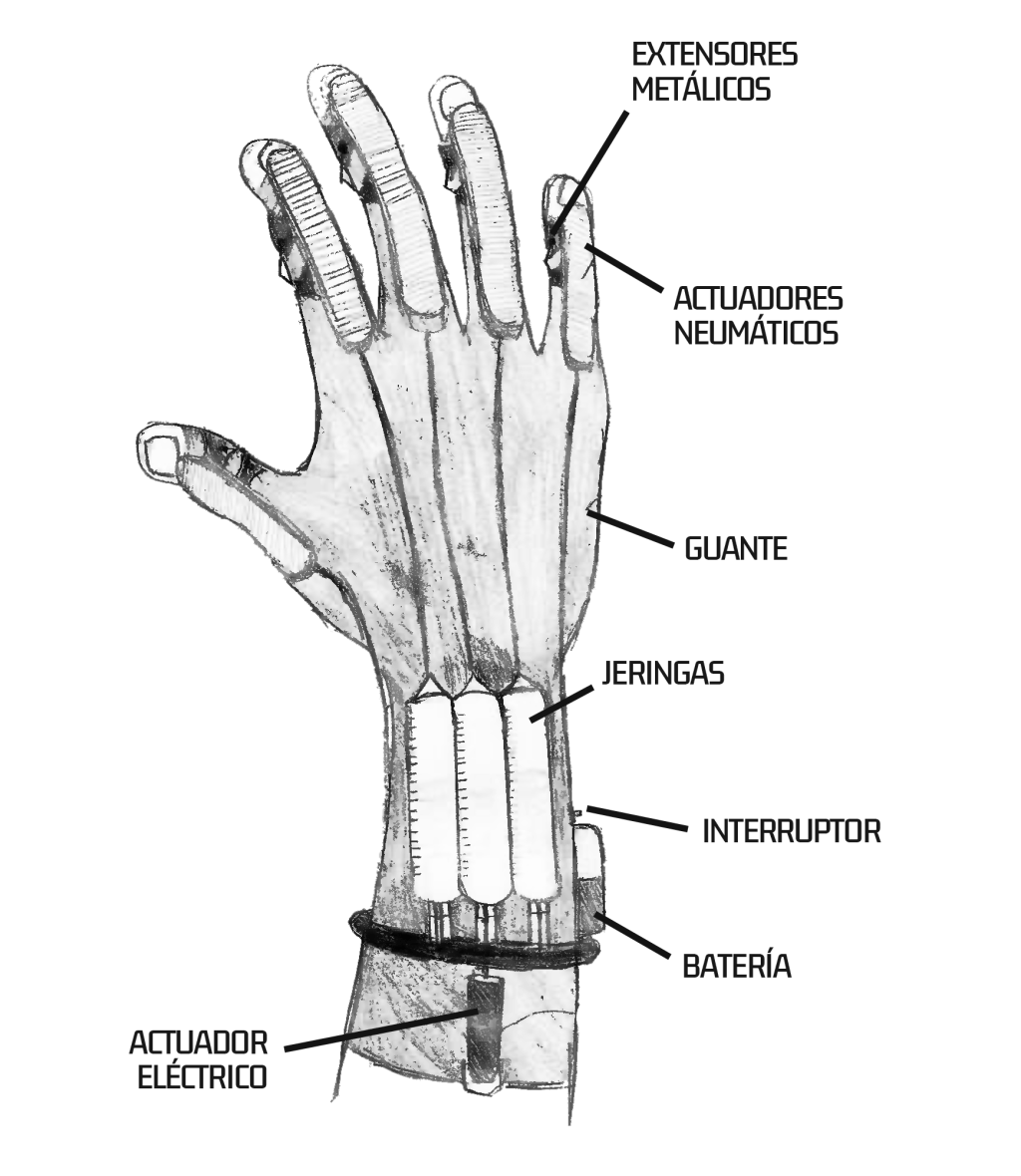
Nuestra primera propuesta consiste en un guante constituido por actuadores hechos con silicona para estabilizar la posición de los dedos, en primer lugar, y para permitir un movimiento de flexión y extensión muscular que simulen la realización del puño casi completo. Estos mecanismos estarán sujetos a unos extensores en la parte inferior de las cavidades para los dedos del guante, las cuales permitirán ejercer tensión para devolver a la mano a su posición de extensión, lo cual permite el estiramiento muscular. Por otro lado, también contará con un sujetador en el extremo del guante para sostener a los reguladores y actuadores.